【ROS实战】01-ROS安装详细指南
【ROS实战】01-ROS安装详细指南
赵洲洋ROS安装与验证完整指南
1. 版本选型
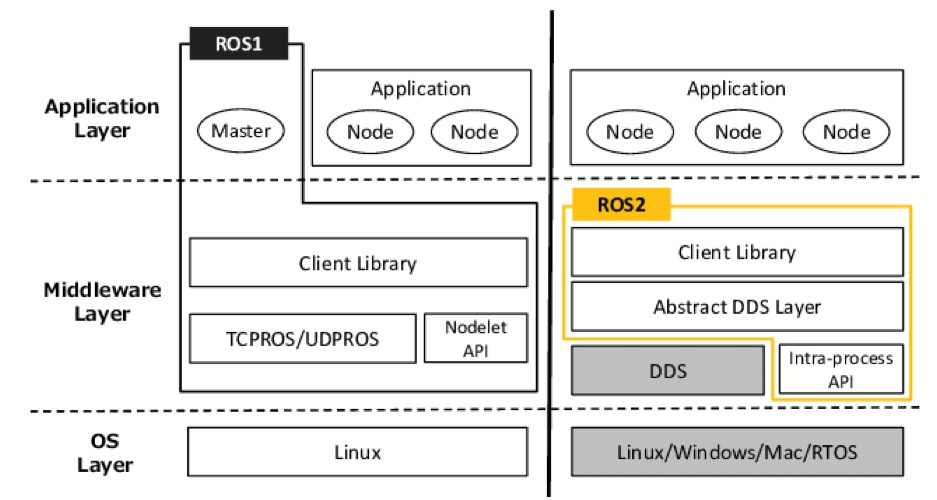
这里,我们选择了ROS Noetic,这是ROS 1系列中最新且最稳定的版本,且仍在持续维护中(文章更新于2025年3月)。虽然一些最新特性仅在ROS 2中可用,但ROS Noetic已经被当前市场上的硬件和开源框架广泛支持,不论是学习,还是追求稳定可靠的运行和支持,ROS Noetic目前都是不错的选择。此外,从ROS 1迁移到ROS 2的学习成本也不高。
操作系统方面,需要对应选择Ubuntu Focal 20.04。
空间需求:安装ROS Noetic需要至少3.7GB的空间,不包括操作系统本身。
2. 源设置
国内用户在安装ROS时,建议替换为本地源以解决网络问题,提升下载速度和稳定性,否则直接按照官方文档,可能会由于网络问题遇到各类不可预期的错误。
2.1 apt源配置
备份原有的/etc/apt/sources.list文件,然后替换为华为云的镜像源:
1 | deb http://repo.huaweicloud.com/ubuntu-ports/ focal main restricted universe multiverse |
2.2 ROS源配置
推荐使用清华大学的ROS镜像源,执行如下命令:
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
3. 密钥设置
为确保软件下载安全,添加ROS官方密钥:
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
4. 更新APT源
更新本地APT源列表,以确保安装最新版本的软件包:
1 | sudo apt update |
5. 安装ROS Noetic
如果没有特殊需求,建议直接安装包含所有核心功能及GUI工具的完整版本:
1 | sudo apt install ros-noetic-desktop-full |
可选的较小版本包括:
- Desktop Install(包含基本GUI工具):
1
sudo apt install ros-noetic-desktop
- ROS-Base(核心库,无GUI工具):
1
sudo apt install ros-noetic-ros-base
6. 环境配置
目前已经安装完成,在使用之前,需要通过如下命令来加载环境变量,以能够在窗口中正常使用ros相关命令
1 | source /opt/ros/noetic/setup.bash |
如果希望自动化确保每个新的终端会话都能正确自动加载ROS环境变量,免除每次手工加载,则可以按照如下方式配置:
Bash 用户
自动加载ROS环境脚本:
1 | echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc |
Zsh 用户
如果使用zsh,添加至.zshrc:
1 | echo "source /opt/ros/noetic/setup.zsh" >> ~/.zshrc |
7. 启动和验证roscore
输入roscore命令启动ROS核心服务,已经可以验证其正常运行。
8. 安装构建和管理工具
安装必要的工具以下载、构建和管理后续的ROS包。
8.1 安装构建工具
1 | sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential |
8.2 初始化rosdep
为了解决国内用户的网络问题,使用rosdepc(针对中国优化的rosdep版本):
1 | sudo apt-get install python3-pip |
9. 启动Turtlesim示例
Turtlesim是一个简单的ROS模拟器,用于学习和测试。启动它需要以下步骤:
确保已按照第6步完成环境配置,否则可能会报错找不到ROS命令。
- 启动ROS主节点:
1
roscore
- 打开Turtlesim节点:
1
rosrun turtlesim turtlesim_node
- 开启键盘控制:
1
rosrun turtlesim turtle_teleop_key


在键盘控制的窗口,可以使用方向键控制小乌龟的移动(前后按键)和转向(左右按键)。
参考资料: