ROS主流版本与适用场景建议
ROS主流版本与适用场景建议
赵洲洋ROS主流版本与适用场景建议
在机器人开发中,ROS(Robot Operating System)是当前最流行的开发框架。随着ROS 1和ROS 2的推出,开发者可以选择不同的ROS版本来满足各种需求。ROS的版本与操作系统(如Ubuntu版本)以及Linux内核的兼容性密切相关。本文将探讨ROS 1和ROS 2的主要版本、生命周期以及如何根据Ubuntu版本和Linux内核选择最合适的组合,并提供一些具体的应用场景建议。
1. ROS 版本概览与支持情况
ROS 1 版本
ROS 1已经存在多年,虽然ROS 2逐渐成为未来的方向,但ROS 1仍然在很多老旧项目中被广泛使用。以下是ROS 1的主要版本及其维护状态:
| 版本 | 发布日期 | EOL(结束维护日期) | 支持的Ubuntu版本 |
|---|---|---|---|
| ROS Noetic | 2020年5月23日 | 2025年5月(Ubuntu 20.04 LTS支持) | Ubuntu 20.04 LTS |
| ROS Melodic | 2018年5月23日 | 2023年6月27日 | Ubuntu 18.04 LTS |
| ROS Lunar | 2017年5月23日 | 2019年5月 | Ubuntu 16.04 LTS |
| ROS Kinetic | 2016年5月23日 | 2021年4月 | Ubuntu 16.04 LTS |
维护状态:
- ROS 1 Noetic 是目前支持的最新LTS版本,维护至 2025年5月。是开发长期稳定项目时的推荐版本。
- ROS 1 Melodic 已于 2023年6月结束维护,不推荐用于新项目,但仍可用于现有项目的维护。
- ROS 1 Kinetic 和 Lunar 版本已停止维护,除非必须在遗留项目中使用,否则不推荐。
ROS 2 版本
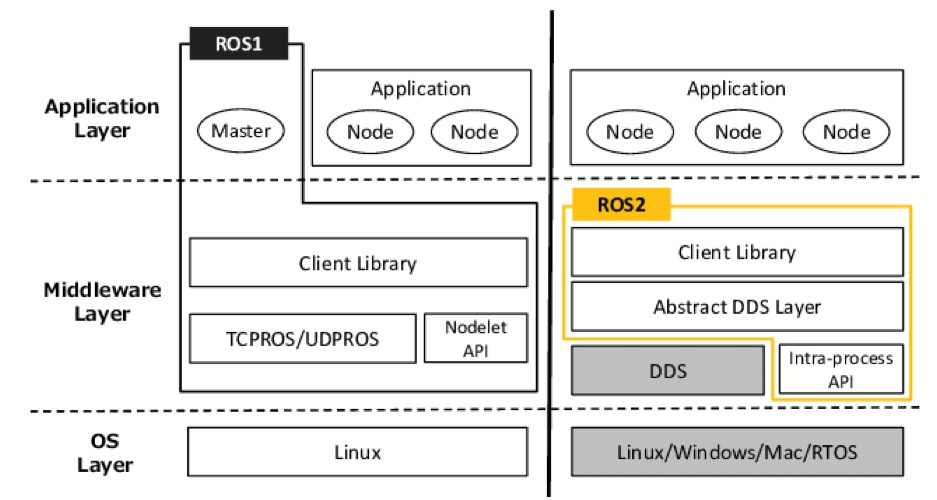
ROS 2是ROS 1的继任者,强调实时性、分布式系统支持和更好的跨平台支持。随着ROS 2的逐步发展,很多版本已经进入了EOL(生命周期结束)。以下是ROS 2版本的详细维护状态:
| 版本 | 发布日期 | EOL(结束维护日期) | 维护者 |
|---|---|---|---|
| ROS 2 Jazzy | 2024年5月23日 | 2029年5月 | Marco A. Gutiérrez |
| ROS 2 Iron | 2023年5月23日 | 2024年12月4日 | Yadunund Vijay |
| ROS 2 Humble | 2022年5月23日 | 2027年5月 | Audrow Nash |
| ROS 2 Galactic | 2021年5月23日 | 2022年12月9日 | Scott Logan |
| ROS 2 Foxy | 2020年6月5日 | 2023年6月20日 | Jacob Perron / Dharini Dutia |
| ROS 2 Eloquent | 2019年11月22日 | 2020年11月 | Michael Carroll |
| ROS 2 Dashing | 2019年5月31日 | 2021年5月 | Steven! Ragnarök |
维护状态:
- ROS 2 Jazzy(即 Jazzy Jalisco)是即将发布的下一个LTS版本,计划支持到 2029年5月,适合长期使用。
- ROS 2 Iron 目前仍然有效,但计划于 2024年12月4日停止维护,适合短期项目或准备迁移至更新版本的用户。
- ROS 2 Humble 是当前的LTS版本,计划支持到 2027年5月,非常适合长期项目开发。
- ROS 2 Foxy 和 ROS 2 Galactic 已经结束维护,不推荐用于新项目。
2. Ubuntu版本与Linux内核的关系
ROS版本与Ubuntu版本的兼容性非常重要。Ubuntu LTS(长期支持版)是机器人开发中最常用的操作系统,且具有较长的支持期。以下是主要的Ubuntu版本及其支持的Linux内核版本:
Ubuntu 20.04 LTS(支持Linux内核5.4及以上)
- 推荐搭配 ROS 1 Noetic 和 ROS 2 Foxy、ROS 2 Galactic。
Ubuntu 22.04 LTS(支持Linux内核5.15及以上)
- 推荐搭配 ROS 2 Humble 和 ROS 2 Iron,并且支持 ROS 2 Jazzy。
注意: 如果你使用的是ROS 1版本,建议选择Ubuntu 20.04 LTS,因为这是ROS 1 Noetic的官方支持版本。如果使用ROS 2,Ubuntu 22.04 LTS更适合使用较新的ROS 2版本,如 Humble 或 Iron。
3. ROS与Ubuntu版本的最佳匹配
选择ROS 1的场景(需要稳定性)
- 长期稳定的项目:如一些商业化或已部署的系统,使用ROS 1的Noetic版本与Ubuntu 20.04 LTS相结合,能够确保系统的稳定性和长期支持。
- 不需要实时性要求:如果项目对实时性要求较低,但需要高度稳定的框架(例如一些小型机器人或学术研究项目),使用ROS 1仍然是一个较好的选择。
- 需要兼容性与现有软件:ROS 1有着较为成熟的生态和大量的第三方库,很多已经开发的工具和库都只兼容ROS 1。
选择ROS 2的场景(需要最新特性)
- 实时性要求较高的项目:ROS 2专注于支持实时操作系统,适合要求精确控制和响应时间的项目,如工业自动化、无人驾驶等。
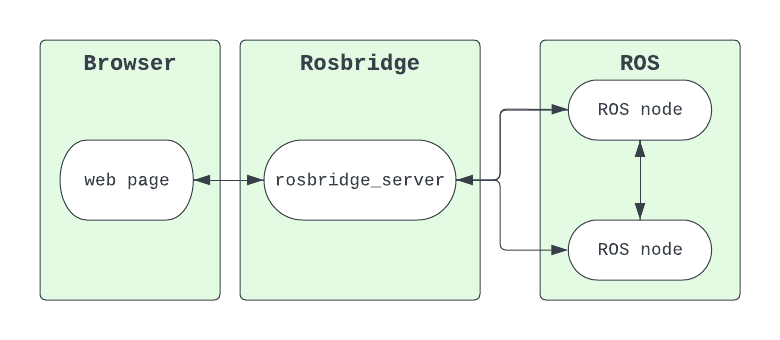
- 分布式或跨平台应用:ROS 2的分布式架构使其非常适合需要多个节点协作或跨平台部署的场景(如Windows、Linux或Mac系统共存的场景)。
- 未来可扩展性:如果项目的需求可能会随着时间的推移而增加(例如扩展到云端或集成更多的传感器和控制器),ROS 2的更高灵活性和模块化架构提供了更好的支持。
- 使用较新的硬件:ROS 2支持更多的现代硬件接口和新技术(例如DDS通信中间件),因此适合最新硬件平台的开发。
不推荐的选择(已经不再维护的版本)
- ROS 1的老版本:如ROS 1的Kinetic和Melodic版本,虽然这些版本在过去被广泛使用,但它们已经逐渐不再得到社区支持。除非项目已经有现成的ROS 1代码,否则不推荐使用过时的版本。
- ROS 2的已停止维护版本:如Dashing、Eloquent和Galactic版本,这些版本已经停止维护,不再接收安全更新和功能改进,因此不推荐选择这些版本进行新项目开发。
4. 总结与推荐
| 场景 | 推荐的ROS版本 | 推荐的Ubuntu版本 | 推荐的Linux内核版本 |
|---|---|---|---|
| 需要稳定性的项目 | ROS 1 Noetic | Ubuntu 20.04 LTS | Linux 5.4及以上 |
| 实时性要求高的项目 | ROS 2 Humble/Iron | Ubuntu 22.04 LTS | Linux 5.15及以上 |
| 跨平台分布式应用 | ROS 2 Humble/Iron | Ubuntu 22.04 LTS | Linux 5.15及以上 |
| 长期维护且稳定的系统 | ROS 1 Noetic | Ubuntu 20.04 LTS | Linux 5.4及以上 |
关键建议:
- ROS 1 Noetic 和 ROS 2 Humble/Iron 是目前推荐的稳定版本,适合长期维护和开发。
- 对于需要实时性、分布式功能或跨平台支持的应用,ROS 2 Humble 或 ROS 2 Iron 版本是最佳选择,特别是 Humble 是一个LTS版本,适合长期使用。
- 避免使用 ROS 2 Dashing、Eloquent、Galactic 等已停止维护的版本,除非是为了兼容旧项目。

猜你喜欢

评论
匿名评论隐私政策